Scenes
A scene encapsulates the information required to generate one or more images. To define a scene, the user specifies a collection of plots (e.g., volume or surface rendering) and associated parameters such as camera definitions, light positions, and annotations. The simplest plot description requires only a plot type and scalar field name. A scene defined in this way uses the default data source, which is all of the data published by the simulation, and default settings for camera position, image resolution, lighting, and annotations.
Default Images
When creating a scene, Ascent will set up camera and color table defaults.
The only requirement is that either a image_name or image_prefix
be provided. Minimally, a scene consists of one plot and a parameter
to specify the output file name. Default images images have a resolution
of 1024x1024.
conduit::Node scenes;
scenes["s1/plots/p1/type"] = "pseudocolor";
scenes["s1/plots/p1/field"] = "braid";
// scene default image prefix
scenes["s1/image_prefix"] = output_file_name;
If anything other than the default camera, annotation, image resolution, or color table parameters are needed, then a render will need to be specified. Renders are covered later in this section.
Image Prefix
The image_prefix is a string denotes a prefix to be used when saving
the image. For multiple cycles, the cycle number will be appended to the
image filename. Numeric formatting, similar to printf is supported
within the image prefix. Assuming the cycle is 10, here are some examples:
image_:image_10.png
image_%04d:image_0010.png
Image Name
The image_name parameter specifies the exact file name of the of the output
image, and Ascent will append the .png to the image file name. If not changed,
the image file will be overwritten.
Plots
We current have support for three plot types: pseudocolor, volume, and mesh. Both plots support node centered and element centered scalar fields. Plots optionally consume the result of a pipeline, but if none is specified, then the plot input is the published mesh data. Each scene can contain one or more plots. The plot interface is simply:
type: "plot_name"
pipeline: "pipeline_name"
field: "field_name"
In c++, the equivalent declarations would be as follows:
conduit::Node plot;
plot["type"] = "plot_name";
plot["pipeline"] = "pipeline_name";
plot["field"] = "field_name";
Pseudocolor
A pseudocolor plot simply renders the mesh coloring by the provided scalar field. Below is an example of creating a scene with a single pseudocolor plot with the default pipeline:
conduit::Node scenes;
scenes["s1/plots/p1/type"] = "pseudocolor";
scenes["s1/plots/p1/field"] = "braid";
// scene default image prefix
scenes["s1/image_prefix"] = output_file_name;
conduit::Node actions;
conduit::Node &add_plots = actions.append();
add_plots["action"] = "add_scenes";
add_plots["scenes"] = scenes;
An example of creating a scene with a user defined pipeline:
conduit::Node pipelines;
// pipeline 1
pipelines["pl1/f1/type"] = "contour";
// filter knobs
conduit::Node &contour_params = pipelines["pl1/f1/params"];
contour_params["field"] = "braid";
contour_params["iso_values"] = 0.;
conduit::Node scenes;
scenes["s1/plots/p1/type"] = "pseudocolor";
scenes["s1/plots/p1/field"] = "radial";
scenes["s1/plots/p1/pipeline"] = "pl1";
scenes["s1/image_prefix"] = output_file;
conduit::Node actions;
// add the pipeline
conduit::Node &add_pipelines= actions.append();
add_pipelines["action"] = "add_pipelines";
add_pipelines["pipelines"] = pipelines;
// add the scenes
conduit::Node &add_scenes= actions.append();
add_scenes["action"] = "add_scenes";
add_scenes["scenes"] = scenes;
In addition to surfaces, this pseudocolor color plot can render point meshes with no additional parameters. While there is a default point radius, the plot options allow for constant or variable radii.
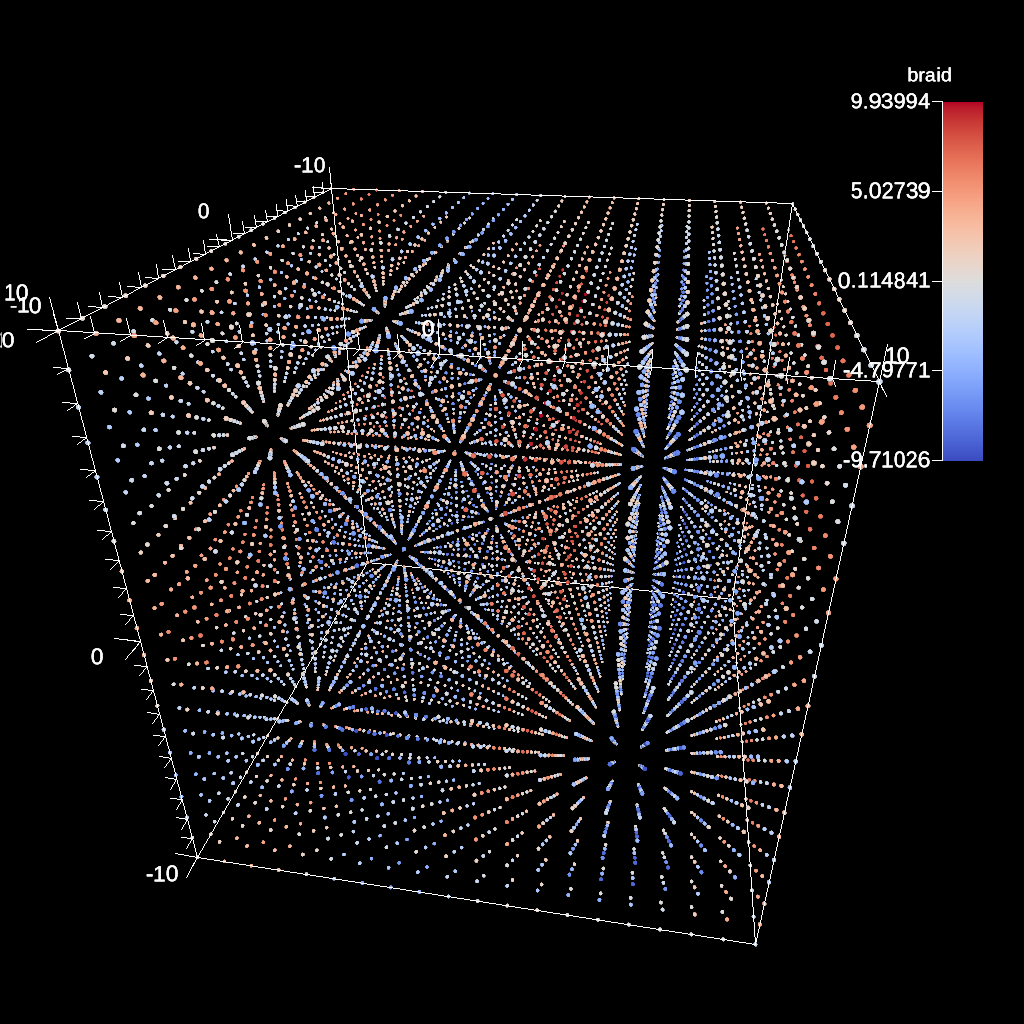
Fig. 25 Default heuristic for points size
conduit::Node scenes;
scenes["s1/plots/p1/type"] = "pseudocolor";
scenes["s1/plots/p1/field"] = "braid";
scenes["s1/plots/p1/points/radius"] = 1.f;
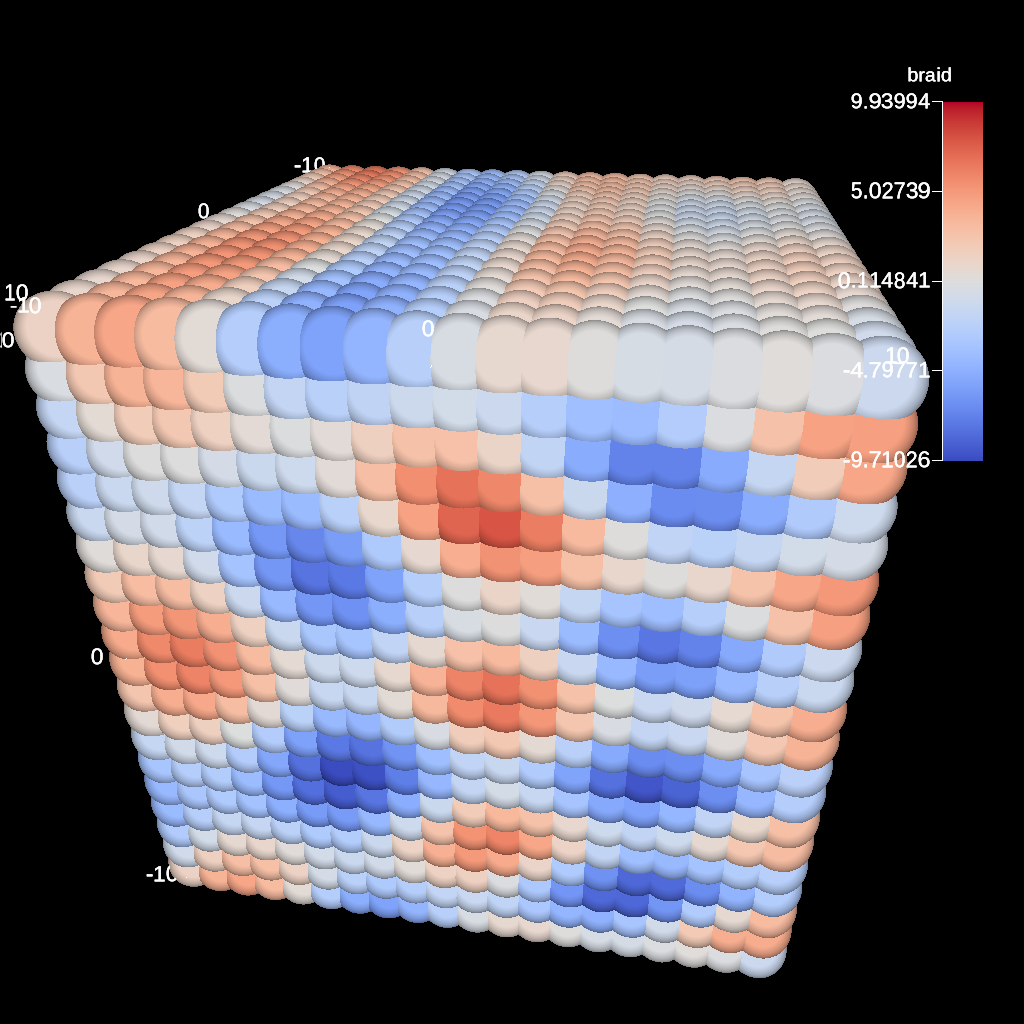
Fig. 26 Point mesh rendered with a constant radius
For variable radii, the field values are used to scale each points radius
relative to the global min and max scalar value. The inputs are the base
radius size, and the delta (multiplier) of the radius. In the example below, scalar
values at the minimum of the scalar range will have a radius of 0.25 and scalar
values at the max will have radii of 0.25 + 0.5.
conduit::Node scenes;
scenes["s1/plots/p1/type"] = "pseudocolor";
scenes["s1/plots/p1/field"] = "braid";
scenes["s1/plots/p1/points/radius"] = 0.25f;
// this detla is relative to the base radius
scenes["s1/plots/p1/points/radius_delta"] = 2.0f;
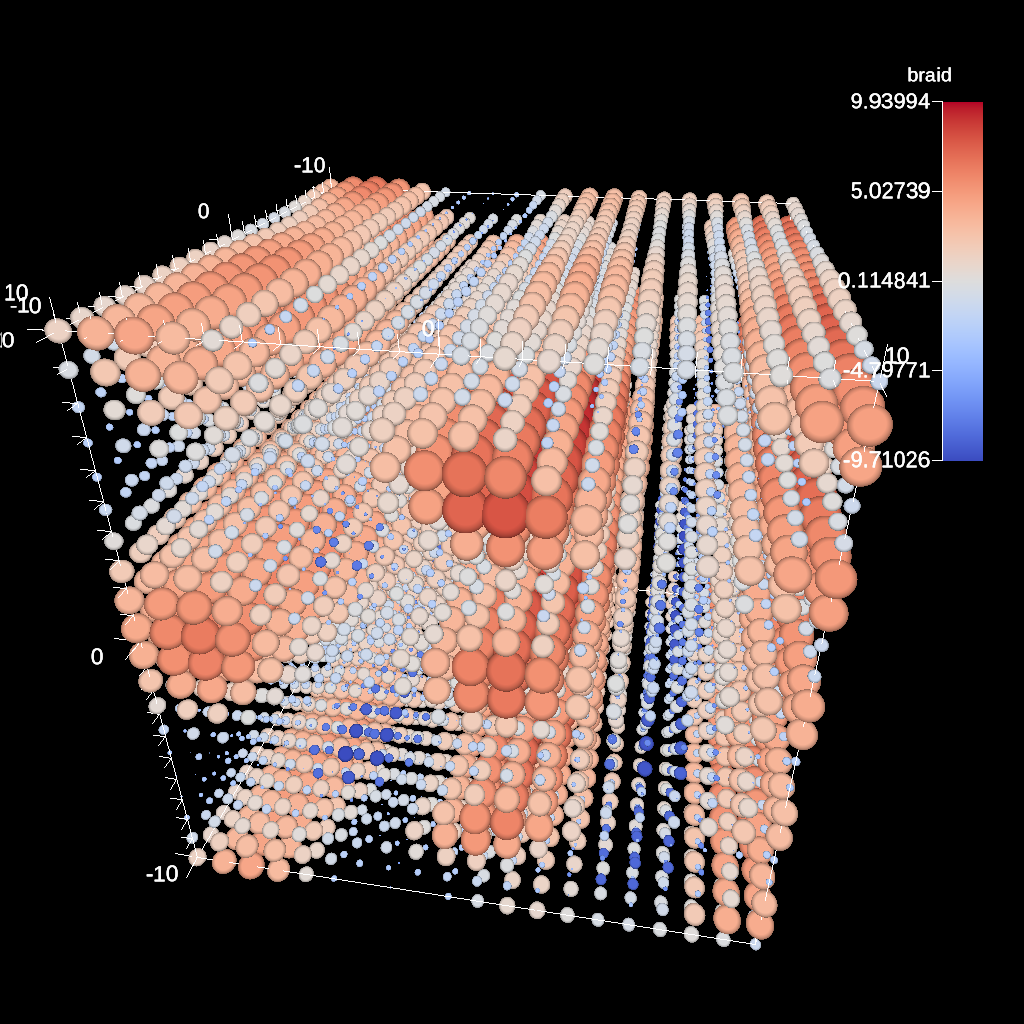
Fig. 27 Point mesh rendered with a variable radius
Volume Plot
The volume plot produces a volume rendering of the provided scalar field. The code below creates a volume plot of the default pipeline.
conduit::Node scenes;
scenes["s1/plots/p1/type"] = "volume";
scenes["s1/plots/p1/field"] = "braid";
conduit::Node actions;
conduit::Node &add_plots = actions.append();
add_plots["action"] = "add_scenes";
add_plots["scenes"] = scenes;
Mesh Plot
The mesh plot, displays the computational mesh over which the simulations variables are defined. The mesh plot is often added to the scene window when other plots are visualized to allow individual cells to be clearly seen. The code below creates a volume plot of the default pipeline.
conduit::Node scenes;
scenes["s1/plots/p1/type"] = "mesh";
conduit::Node actions;
conduit::Node &add_plots = actions.append();
add_plots["action"] = "add_scenes";
add_plots["scenes"] = scenes;
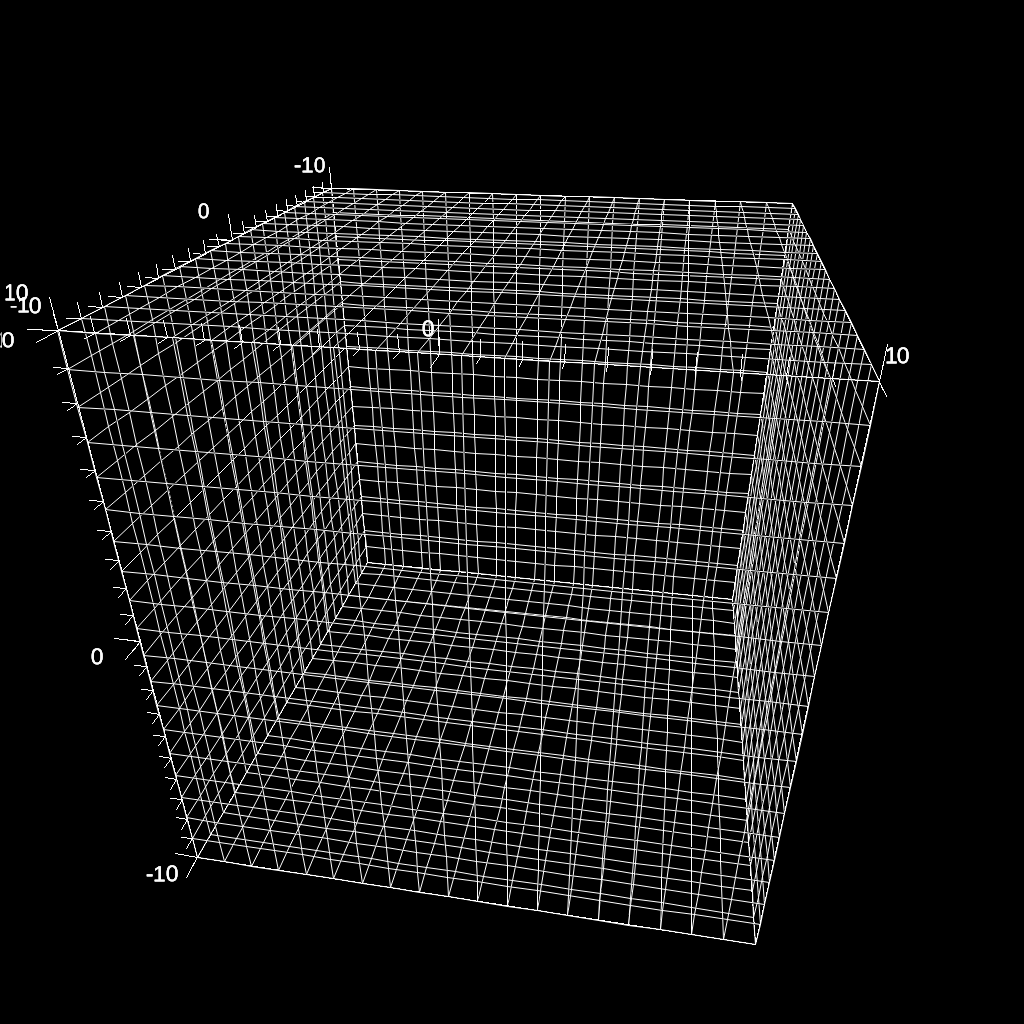
Fig. 28 A mesh plot of simple grid.
Color Tables
The color map translates normalized scalars to color values. Color maps
can be applied to each each plot in a scene.
Image of the color tables provided by Viskores can be found in Viskores Color Tables.
Minimally, a color table name needs to be specified, but the color_table node allows you to specify RGB and Alpha (opacity) control points for complete customization of color maps.
Alpha control points are used when rendering volumes.
The built-in Color map names are: Cool to Warm, Black-Body Radiation, Samsel Fire, Inferno, Linear YGB, Cold and Hot, Rainbow Desaturated, Cool to Warm (Extended), X Ray, Black, Blue and White, Viridis, Linear Green, Jet, and Rainbow.
Colors are three double precision values between 0 and 1.
Alphas and positions are a single double precision values between 0 and 1.
Here is an example of specifying a color table by name:
conduit::Node scenes;
scenes["s1/plots/p1/type"] = "pseudocolor";
scenes["s1/plots/p1/field"] = "braid";
scenes["s1/plots/p1/color_table/name"] = "Viridis";
Color in the table can be reversed through an optional parameter:
scenes["s1/plots/p1/color_table/reverse"] = "true";
The color table can be made (pseudo) discrete through an optional parameter:
scenes["s1/plots/p1/color_table/discrete"] = "true";
Volume plots are special since ray casting blends colors together. When no color table is specified, alpha values are automatically created, but when a color table is specified, then the color table needs to include alpha values. Otherwise, the volume plot will look exactly the same as a pseudocolor plot.
There are two formats that can be used to add a custom color table. The first is a compact color table format:
conduit::Node control_points;
control_points["r"] = {.23, .48, .99};
control_points["g"] = {0.08, .23, 1.};
control_points["b"] = {0.08, .04, .96};
control_points["a"] = {1., 1., 1.};
control_points["position"] = {0., .5, 1.};
conduit::Node scenes;
scenes["s1/plots/p1/type"] = "volume";
scenes["s1/plots/p1/field"] = "braid";
scenes["s1/plots/p1/color_table/control_points"] = control_points;
conduit::Node actions;
conduit::Node &add_plots = actions.append();
add_plots["action"] = "add_scenes";
add_plots["scenes"] = scenes;
Alternatively, there is a second, expanded color table format that can be used. Here is an example of adding a custom color table to the volume plot:
conduit::Node control_points;
conduit::Node &point1 = control_points.append();
point1["type"] = "rgb";
point1["position"] = 0.;
double color[3] = {1., 0., 0.};
point1["color"].set_float64_ptr(color, 3);
conduit::Node &point2 = control_points.append();
point2["type"] = "rgb";
point2["position"] = 0.5;
color[0] = 0;
color[1] = 1.;
point2["color"].set_float64_ptr(color, 3);
conduit::Node &point3 = control_points.append();
point3["type"] = "rgb";
point3["position"] = 1.0;
color[1] = 0;
color[2] = 1.;
point3["color"].set_float64_ptr(color, 3);
conduit::Node &point4 = control_points.append();
point4["type"] = "alpha";
point4["position"] = 0.;
point4["alpha"] = 0.;
conduit::Node &point5 = control_points.append();
point5["type"] = "alpha";
point5["position"] = 1.0;
point5["alpha"] = 1.;
conduit::Node scenes;
scenes["s1/plots/p1/type"] = "volume";
scenes["s1/plots/p1/field"] = "braid";
scenes["s1/plots/p1/color_table/control_points"] = control_points;
conduit::Node actions;
conduit::Node &add_plots = actions.append();
add_plots["action"] = "add_scenes";
add_plots["scenes"] = scenes;
Clamping Scalar Values
The minimum and maximum values of a scalar field varies with each simulation time step, and rendering plots of the same field from different time steps causes inconsistent mappings from scalars values to colors. To create a consistent mapping, a plot has two optional parameters that clamp the scalar values to a given range. Any scalar value above the maximum value will be clamped to the maximum, and any scalar value below the minimum value will be clamped to the minimum.
Here is an example of clamping the scalar values to the range [-0.5, 0.5].
conduit::Node scenes;
scenes["s1/plots/p1/type"] = "pseudocolor";
scenes["s1/plots/p1/field"] = "braid";
scenes["s1/plots/p1/min_value"] = -0.5;
scenes["s1/plots/p1/max_value"] = 0.5;
Renders (Optional)
Scenes contains a list of Renders that specify the parameters of a single image. If no render is specified, a default render is created automatically. Here is an example of creating a scene with render with some basic parameters:
conduit::Node scenes;
scenes["s1/plots/p1/type"] = "pseudocolor";
scenes["s1/plots/p1/field"] = "braid";
scenes["s1/image_prefix"] = output_file;
scenes["s1/renders/r1/image_width"] = 512;
scenes["s1/renders/r1/image_height"] = 512;
scenes["s1/renders/r1/image_name"] = output_file;
Now we add a second render to the same example using every available parameter:
scenes["s1/renders/r2/image_width"] = 300;
scenes["s1/renders/r2/image_height"] = 400;
scenes["s1/renders/r2/image_name"] = output_file2;
double vec3[3];
vec3[0] = 1.; vec3[1] = 1.; vec3[2] = 1.;
scenes["s1/renders/r2/camera/look_at"].set_float64_ptr(vec3,3);
vec3[0] = 15.; vec3[1] = 17.; vec3[2] = 15.;
scenes["s1/renders/r2/camera/position"].set_float64_ptr(vec3,3);
vec3[0] = 0.; vec3[1] = -1.; vec3[2] = 0.;
scenes["s1/renders/r2/camera/up"].set_float64_ptr(vec3,3);
scenes["s1/renders/r2/camera/fov"] = 45.;
scenes["s1/renders/r2/camera/xpan"] = 1.;
scenes["s1/renders/r2/camera/ypan"] = 1.;
scenes["s1/renders/r2/camera/azimuth"] = 10.0;
scenes["s1/renders/r2/camera/elevation"] = -10.0;
scenes["s1/renders/r2/camera/zoom"] = 3.2;
scenes["s1/renders/r2/camera/near_plane"] = 0.1;
scenes["s1/renders/r2/camera/far_plane"] = 33.1;
renders:
r1:
image_width: 300
image_height: 400
image_name: "some_image"
camera:
look_at: [1.0, 1.0, 1.0]
position: [0.0, 25.0, 15.0]
up: [0.0, -1.0, 0.0]
fov: 60.0
xpan: 0.0
ypan: 0.0
elevation: 10.0,
azimuth: -10.0,
zoom: 0.0
near_plane: 0.1
far_plane: 100.1
Rendering Camera Configuration
Ascent supports rendering in both 2D and 3D. For 3D rendering, Ascent supports two primary methods for defining the camera: the Ascent native (Viskores style) camera, which is camera-centric, and the VisIt style camera, which is view-centric. Both formats provide control over how scenes are rendered, but they differ in terminology, orientation, and internal computation of the view matrix.
2D Camera
2D rendering can be accomplished by defining the 2D view bounds of the rendered scene.
2dorwindowCoords: Enables 2D rendering mode. Expects a 4-element array defining the 2D view bounds [x0 (left), x1 (right), y0 (bottom), y1 (top)].
Ascent Native (Viskores Style) Camera
The native Ascent camera follows the Viskores camera model which focuses on defining the camera’s physical parameters and orientation in 3D space. This camera-centric approach specifies where the camera is located, what it is looking at, and how it is oriented. The following parameters are supported:
look_at: A 3-element array [x, y, z] indicating the point the camera is directed toward.position: A 3-element array [x, y, z] indicating the camera’s position in space.up: A 3-element vector that defines the up direction of the camera.fov: Field of view in degrees for perspective projection.xpan: Pan offset in the horizontal direction.ypan: Pan offset in the vertical direction.zoom: Uniform zoom factor applied to the view.near_plane: Distance from the camera to the near clipping plane.far_plane: Distance from the camera to the far clipping plane.azimuth: Rotates the camera around the up axis.elevation: Rotates the camera around the right axis.
VisIt Style Camera
Alternatively, the camera can be defined using the VisIt camera parameters which follows a view centric approach.
Instead of positioning the camera explicitly, it defines the view using vectors like view_normal and view_up, which describe the direction and orientation of the camera relative to a focal point.
The following parameters are supported:
view_normal: A vector [x, y, z] indicating the direction to the camera from thefocuspoint.focus: A 3D point [x, y, z] indicating the point of focus in the scene.view_up: A vector indicating which direction is up in the rendered view.view_angle: Field of view half-angle in degrees. This is equivalent to 2x thefovvalue of the Ascent Cameraparallel_scale: Half of the image height in world space.near_plane: Distance from thefocuspoint along theview_normalto the near clipping plane.far_plane: Distance from thefocuspoint along theview_normalto the far clipping plane.image_pan: A 2-element array [x, y] specifying image-space panning.image_zoom: Zoom factor for the image.
Unsupported VisIt Camera Parameters
In addition to the above supported VisIt camera parameters, there are a number of VisIt camera parameters that are not completely translatable to the Viskores style camera and are therefore currently ignored.
Note
These parameters are safely ignored if provided. They will not influence the rendered image but also will not produce errors.
perspective: Boolean flag (true/false) indicating whether to use perspective (true) or parallel (false) projection. In Ascent, only perspective projection is currently used so this flag is ignored.eye_angle: Used in stereo rendering to control the eye separation angle. Ascent does not currently support stereo rendering, so this has no effect.center_of_rotation_set: Boolean flag indicating whethercenter_of_rotationhas been explicitly set. Not used in Ascent.center_of_rotation: A 3D point used as the pivot for interactive rotation in VisIt. Ascent does not support interactive camera manipulation, so this is ignored.axis_3d_scale_flag: Boolean flag that enables non-uniform axis scaling (e.g., X:Y:Z aspect ratios). Not supported in Ascent.axis_3d_scale: A 3D vector specifying per-axis scaling for non-uniform visualizations. No effect in Ascent.shear: A 3-element array used to apply a shear transformation to the view. Not currently implemented.window_valid: Internal VisIt flag to indicate whether the current window setup is valid. Irrelevant in Ascent and ignored.
Additional Render Options
In addition to image and camera parameters, renders have several options that allow the users to control the appearance of images. Below is a list of additional parameters:
bg_color: an array of three floating point values that controls the background color.fg_color: an array of three floating point values that controls the foreground color. The foreground color is used to color annotations and mesh plot lines.annotations: controls if annotations are rendered or not. Valid values are"true"and"false".render_bg: controls if the background is rendered or not. If no background is rendered, the background will appear transparent. Valid values are"true"and"false".dataset_bounds: controls the dimensions of the rendered bounding box around the dataset. This will overwrite the default bounding box based on the dataset’s dimensions. A valid value is an array of six floats ([xMin,xMax,yMin,yMax,zMin,zMax]) that define dimensions larger than the default. Note: this does not control annotations. To turn off dataset annotations, see An example of rendering with no world annotations.. To turn off screen annotations, see An example of rendering with no screen annotations..color_bar_position: controls the position of 1 or more color bars. A valid value for positioning a single color bar is an array of four floats ([xMin,xMax,yMin,yMax]). A valid value for positioning N color bars is an array of 4*N floats ([xMin1_0,xMax1_0,yMin1_0,yMax1_0,…,xMin_n,xMax_n,yMin_n,yMax_n]). This repositioning is performed in Screen Space, so valid minimum and maximum values are limited to the range [-1,1] (i.e. the origin (0,0) is in the center of the image, (-1,-1) is the bottom-left corner, and (1,1) is the top-right corner). Note: Ascent does not check for correctness of user positioned color bars.
Tiled Rendering
The renderer supports tiled rendering where the image is divided into a regular grid and each section of the grid, or tile, is rendered separately.
The advantage of tiled rendering is that it requires fewer resources than rendering the entire image at once.
Tiled rendering supports five tiled_rendering_type’s - square_tiles, rectangular_tiles, horizontal_strips, vertical_strips and optimized_tiles.
When the tiled_rendering_type is square_tiles, the tiles are square where the width and height are given by the tile_width.
When the tiled_rendering_type is rectangular_tiles, the tiles are rectangular where the width and height are given by the tile_width and tile_height.
When the tiled_rendering_type is horizontal_strips, the tiles are horizontal strips that are the width of the image with a height of tile_height.
When the tiled_rendering_type is vertical_strips, the tiles are vertical strips that are the height of the image with a width of tile_width.
When the tiled_rendering_type is optimized_tiles, the tiles are rectangular with a maximum width and height of tile_width and tile_height such that the extra pixels in the rows and columns is minimized.
Tiled rendering is on by default, with optimized_tiles and 1024 by 1024 tiles.
Below is a list of the parameters that control tiled rendering:
tiled_rendering: controls if tiled rendering is enabled. Valid values are"true"and"false". The default is"true".tiled_rendering_type: controls the tiled rendering type. Valid values are"square_tiles","rectangular_tiles","horizontal_strips","vertical_strips"and"optimized_tiles". The default is"optimized_tiles".tile_width: The width of a tile. The default is1024.tile_height: The height of a tile. The default is1024.
Automatic Camera
The automatic camera render is used to automatically choose a camera placement, basing the decision on a user-chosen viewpoint quality (VQ) metric. The automatic camera render requires a mesh and scalar field data, and works in conjunction with other Filters. The automatic camera render analyzes the data that will be rendered using a user-chosen metric and number of considered cameras. Given the number of cameras, the camera placements are determined using Fibonacci’s Lattice, a method for placing points around a unit sphere, and the camera is pointed at the center of the data.
A user can specify the number of camera samples (auto_camera/samples) to consider when determining the best camera placement.
The user also specifies the field data (auto_camera/field) the VQ metric will operate on, as well as the VQ metric (auto_camera/metric).
The current VQ metrics and respective keywords are:
Data Entropy :
data_entropyDepth Entropy :
depth_entropyShading Entropy :
shading_entropyDDS Entropy :
dds_entropy
There are also several optional parameters a user can specify, such as the number of bins (auto_camera/bins=256) to be used in the entropy calculations, as well as height (auto_camera/height=1024) and width (auto_camera/width=1024).
Usage Recommendation: Automatically producing quality camera placements is a difficult task, and not all of the available VQ metrics consistently produce viewpoints that users want to see or find insightful. If users do not have a prior preference, we recommend using the VQ metric DDS Entropy, which is the sum of Data Entropy, Depth Entropy, and Shading Entropy. Marsaglia et al. cite{marsaglialdav} performed a user study that showed that out of the available VQ metrics, DDS Entropy produces viewpoints that scientific experts prefer.
The code below creates a pipeline that first applies a contour filter and then applies the camera filter before declaring a scene.
conduit::Node pipelines;
// pipeline 1
pipelines["pl1/f1/type"] = "isovolume";
// filter knobs
conduit::Node &clip_params = pipelines["pl1/f1/params"];
clip_params["field"] = "braid";
clip_params["min_value"] = 5.;
clip_params["max_value"] = 10.;
//scene 1
conduit::Node scenes;
scenes["s1/plots/p1/type"] = "pseudocolor";
scenes["s1/plots/p1/field"] = "radial";
scenes["s1/plots/p1/pipeline"] = "pl1";
//camera knobs
scenes["s1/renders/r1/type"] = "auto_camera";
scenes["s1/renders/r1/auto_camera/metric"] = "dds_entropy";
scenes["s1/renders/r1/auto_camera/samples"] = 5;
scenes["s1/renders/r1/auto_camera/field"] = "radial";
scenes["s1/renders/r1/image_prefix"] = output_file;
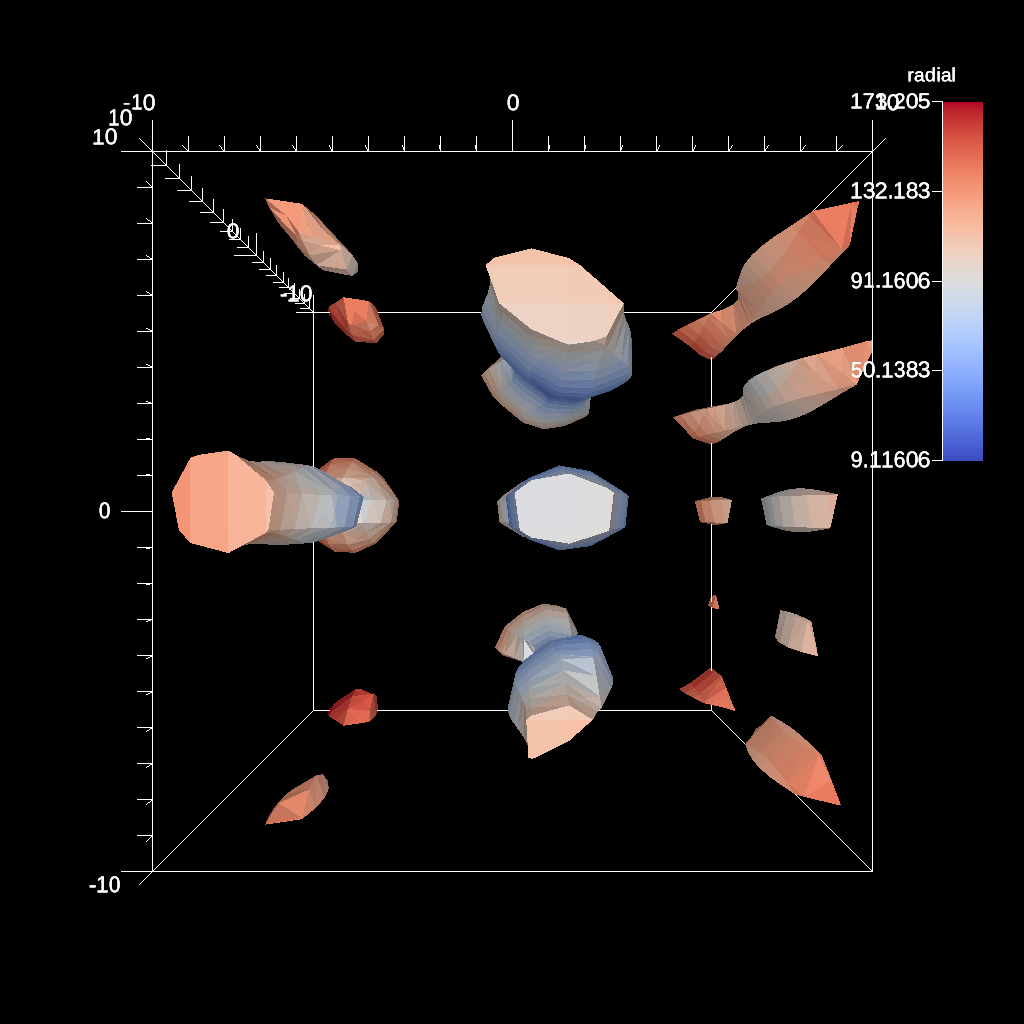
Fig. 29 The default camera placement for this example.
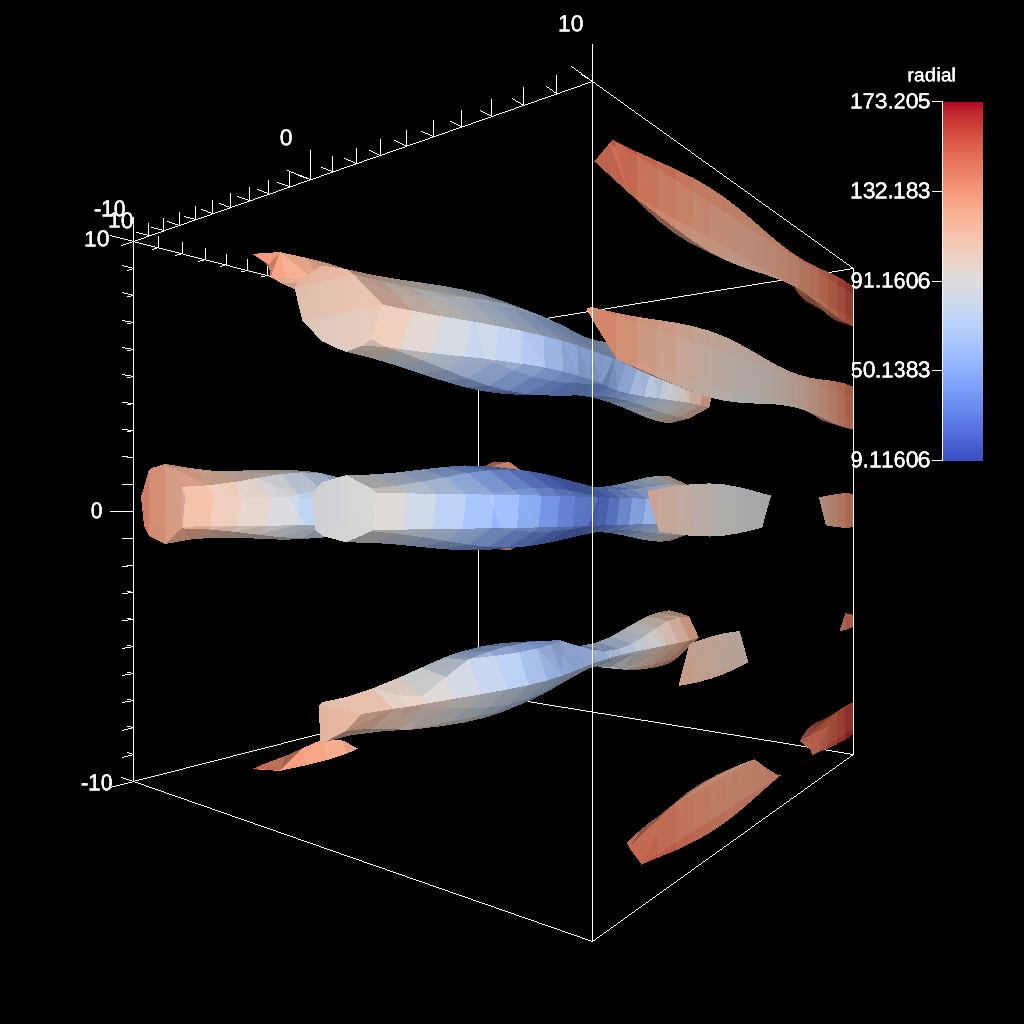
Fig. 30 The camera placement chosen by the VQ metric DDS Entropy for this example. This example and implementation of the other VQ metrics can be found in auto_camera test.
Cinema Databases
The Cinema specification is a image-based solution for post-hoc exploration of simulation data. The idea behind Cinema is images take many orders of magnitude less disk space than that of the entire simulation data. By saving images instead of the full mesh, we can save data much more frequently, giving users access to more temporal fidelity than would be possible otherwise. For a complete overview, see the SC 14 paper. Other Cinema resources can be found at Cinema Science.
Ascent currently supports the creation of the Astaire specification (spec A) which
captures images of the scene from positions on a spherical camera. The number of
images are captured in the parameters phi and theta. phi specifies
the number of divisions along the polar angle and theta specifies the number of
divisions along the azimuth. For example, if phi = 4 and theta = 8 then
the resulting database will contain 4 * 8 images per time step. The Cinema
database can then be explored in a supported viewer. In the future we hope to integrate
a web-based viewer to enable exploration of the Cinema database as the simulation is running.
conduit::Node scenes;
scenes["scene1/plots/plt1/type"] = "pseudocolor";
scenes["scene1/plots/plt1/params/field"] = "braid";
// setup required cinema params
scenes["scene1/renders/r1/type"] = "cinema";
scenes["scene1/renders/r1/phi"] = 2;
scenes["scene1/renders/r1/theta"] = 2;
scenes["scene1/renders/r1/db_name"] = "example_db";
A full code example can be found in the test suite’s Cinema test.